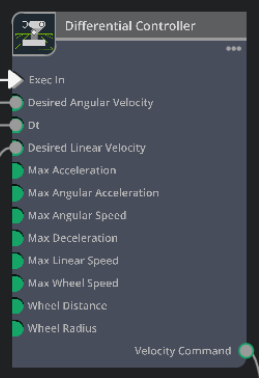
Differential controller
- differential drive(차동구동) 로봇용 컨트롤러 노드이다.
- 입력으로 "원하는 선속도/각속도"를 받으면, 로봇의 "좌/우 바퀴 속도"로 바꿔서 내보내준다.
- Desired Angular Velocity : 원하는 회전 속도.
- Desired Linear Velocity : 원하는 전진 속도
- dt : 시간 간격(초). 보동은 on playback tick.Delta seconds를 연결함.
- wheel Distance : 좌우 바퀴 사이의 거리
- wheel Radius : 바퀴의 반지름
- Max Linear Speed / Max Angular Speed: 속도 제한
- Max Acceleration / Max Deceleration: 선속도 가감속 제한
- Max Angular Acceleration: 각속도 가속 제한
- Max Wheel Speed: 바퀴 회전 속도 제한(라디안/초 같은 단위)
- 출력
- velocity command : 계산된 휠 속도 명령(좌/우) 같은 형태로 나간다. 보통 다음 단계의 "바퀴 조인트에 속도 적용:노드로 연결함

Articulation Controller
- articulation(관절로 구성된 로봇)을 대상으로, 지정한 joint들에 제어 명령(위치/속도/힘)을 넣어주는 역할이다.
- Target Prim / Robot Path : 어떠한 로봇을 제어할지
- Targer Prim에는 보통 직접 타켓 prim을 넘긴다.
- Robot Path에는 로봇 prim 경로를 넣는다
- Joint Names / Joint Indices : 어떤 joint를 제어한지 선택
- joint names에 left_wheel_joint , right_wheel_joint같은 이름을 넣은 방식이 흔함.
- velocity command : 선택한 joints에 대한 목표속도
- position command : 목표 위치
- Effort command : 토크/힘
- exec in : 실행 트리거
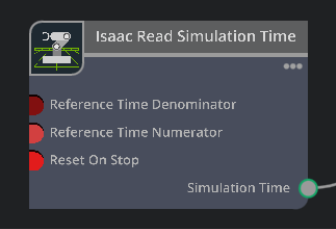
issac read simulation time
- 현재 시뮬레이션 시간을 읽어서 출력함.
- reference time denominator(분모) / reference time numerator(분자) : 시간 기준을 분수형태로 잡는 옵ㅂ션
- reset on stop : 타임라인을 stop했을때, 시간을 0으로 리셋할지 여부
- simulation time : 이는 출력이며, 현재 시뮬레이션의 누적 시간을 의미한다.

isaac simulation gate
- exec(실행) 신호를 "시뮬레이션 스텝 기준으로 걸러서" 통과시키는 게이트/디바이더이다.
- exec in으로 들어오는 "매 틱 실행을" step값에 맞춰서, N스텝마다 한번만 exec out으로 내보낸다.
- 즉, on playback tick처럼 매 프레임/매 틱마다 도는 흐름을 "2스텝 마다","10스텝 마다"같은 식으로 주기를 낮출때 사용한다.
- step : 몇 스텝마다 통과 시킬지 여부
- step = 1이라면, 매 스텝 통과
- step = 2라면, 2스텝마다 1번 통과
- step = 10이라면, 10스텝마다 통과
- exec out은 조건을 만족할때만 나가는 실행 트리거
- step : 몇 스텝마다 통과 시킬지 여부

ros2 publish clock
- isaac sim의 시뮬레이션 시간을 ros2의 clock토픽으로 publish해서, ros쪽 노드들이 "시뮬레이션 시간"을 기준으로 돌아가게 함.
- ros2에서 use_sim_time:=true로 설정한 노드들은 /clock이 들어와야 시간이 진행된다... 따라서 isaac sim을 "시뮬레이터 시간의 마스터"로 사용하기 위해서 필수다.
- exec in : 매 틱마다 publish하도록 트리거 연결
- context : ros2 context 출력 연결
- time stamp : 퍼블리시할 시간 값
'코딩 및 기타' 카테고리의 다른 글
| [isaac sim] ROS2 tutorials 6 (0) | 2026.03.03 |
|---|---|
| [tello] (0) | 2026.03.03 |
| [isaac sim] [node] on playback tick , ros2 context , subscribe twist , scale to stage units (0) | 2026.02.26 |
| [isaac sim] ROS2 tutorials 5 (1) | 2026.02.26 |
| [isaac sim] ROS2 tutorials 4 (0) | 2026.02.23 |