https://docs.isaacsim.omniverse.nvidia.com/5.1.0/ros2_tutorials/tutorial_ros2_tf.html
ROS2 Transform Trees and Odometry — Isaac Sim Documentation
To setup odometry for a robot, publish the odometry ROS message and its corresponding transforms. Note The ROS2 Publish Odometry node publishes full 3D velocity information. Both linear velocity and angular velocity are published with all three dimensions
docs.isaacsim.omniverse.nvidia.com
1. simple room에서 camera 2개를 추가시킨다.

2. action그래프를 추가한다.

3. ros2 publish transform tree에서 targetPrims에 카메라 2개를 추가시킴.

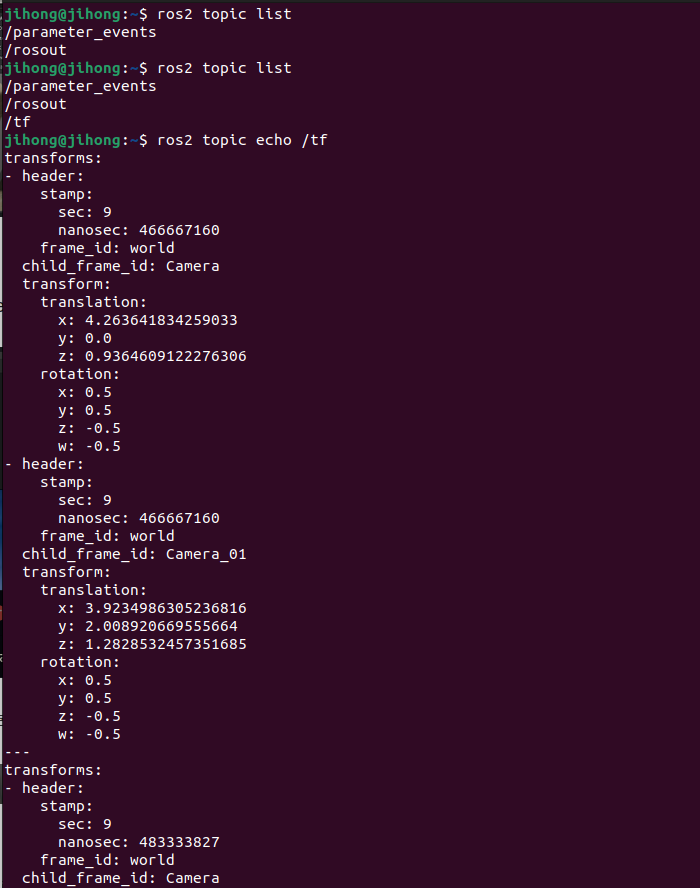
4. 토픽에 /tf가 추가되고, echo입력시 메시지를 볼수있다.
setting up odometry
로봇의 odometry를 설정하기 위해서 ros message와 해당되는 transform을 publish해야함.
1. 우선 터틀봇이 있는 world를 열자.

2. action graph를 이렇게 구성

'코딩 및 기타' 카테고리의 다른 글
| [isaac sim] [node] on playback tick , ros2 context , subscribe twist , scale to stage units (0) | 2026.02.26 |
|---|---|
| [isaac sim] ROS2 tutorials 5 (1) | 2026.02.26 |
| [tello] test 10 11 12 (0) | 2026.01.30 |
| [tello] test5 6 7 8 9 (0) | 2026.01.30 |
| pycharm tello (0) | 2026.01.28 |