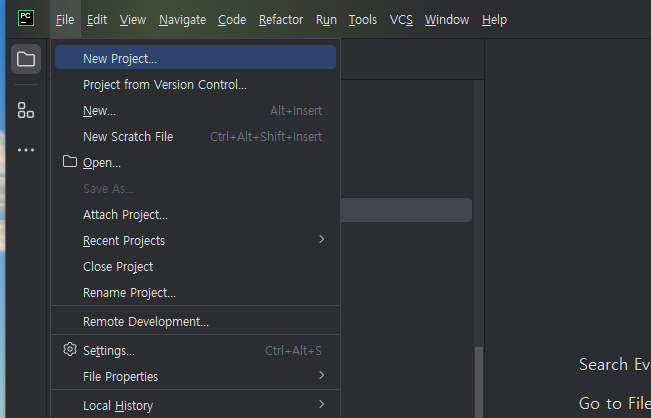
1. pycharm --> new project
2. interpreter에서 venv를 선택

3. 새 프로젝트 생성후 Settings/Preferences → Project → Python Interpreter에서 venv가 선택되어 있는지 확인
4. 다음을 설치
python -m pip install --upgrade pip
pip install djitellopy opencv-python numpy
5.
from djitellopy import Tello
tello = Tello()
tello.connect()
print("battery:", tello.get_battery(), "%")
6.
from djitellopy import Tello
import cv2
tello = Tello()
tello.connect()
tello.streamon()
frame_read = tello.get_frame_read()
while True:
frame = frame_read.frame
cv2.imshow("tello", frame)
if cv2.waitKey(1) & 0xFF == ord('q'):
break
tello.streamoff()
cv2.destroyAllWindows()
7.
from djitellopy import Tello
import time
tello = Tello()
tello.connect()
tello.takeoff()
time.sleep(2)
tello.land()
8.
import cv2
aruco_dict = cv2.aruco.getPredefinedDictionary(cv2.aruco.DICT_4X4_50)
marker_id = 7
marker_size_px = 800 # 크게 만들수록 인식 쉬움
marker = cv2.aruco.generateImageMarker(aruco_dict, marker_id, marker_size_px)
cv2.imwrite("aruco_7.png", marker)
print("saved: aruco_7.png")
import cv2
from djitellopy import Tello
aruco_dict = cv2.aruco.getPredefinedDictionary(cv2.aruco.DICT_4X4_50)
params = cv2.aruco.DetectorParameters()
detector = cv2.aruco.ArucoDetector(aruco_dict, params)
tello = Tello()
tello.connect()
print("Battery:", tello.get_battery(), "%")
tello.streamon()
frame_read = tello.get_frame_read()
while True:
frame = frame_read.frame
if frame is None:
continue
gray = cv2.cvtColor(frame, cv2.COLOR_BGR2GRAY)
corners, ids, _ = detector.detectMarkers(gray)
if ids is not None:
cv2.aruco.drawDetectedMarkers(frame, corners, ids)
cv2.putText(frame, f"IDs: {ids.flatten().tolist()}",
(10, 30), cv2.FONT_HERSHEY_SIMPLEX, 1, (0,255,0), 2)
cv2.imshow("ArUco test (Tello)", frame)
if (cv2.waitKey(1) & 0xFF) == 27: # ESC
break
tello.streamoff()
cv2.destroyAllWindows()
9.
import cv2
import numpy as np
from djitellopy import Tello
# =========================
# 설정값 (여기만 먼저 조정)
# =========================
MARKER_DICT = cv2.aruco.DICT_4X4_50
MARKER_SIZE_M = 0.15 # 마커 한 변 실제 길이(미터). 예: 15cm -> 0.15
TILT_THRESH_DEG = 5.0 # 이 각도(도) 이상이면 "기울어짐"으로 판정
TARGET_ID = None # 특정 ID만 쓸 거면 숫자(예: 7). 아니면 None(첫 마커 사용)
CALIB_PATH = "calib.npz" # 캘리브레이션 파일(있으면 사용). 없으면 대략값 사용
# =========================
# 카메라 내부 파라미터
# =========================
def approx_camera_matrix(w, h, fov_deg=82.0):
# 캘리브레이션 없을 때 "대략"으로 쓰는 내부파라미터
f = (w / 2) / np.tan(np.radians(fov_deg / 2))
cx, cy = w / 2, h / 2
K = np.array([[f, 0, cx],
[0, f, cy],
[0, 0, 1]], dtype=np.float32)
dist = np.zeros((5, 1), dtype=np.float32)
return K, dist
def load_calib_or_approx(w, h, calib_path=CALIB_PATH):
try:
data = np.load(calib_path)
K = data["K"].astype(np.float32)
dist = data["dist"].astype(np.float32)
return K, dist, True
except Exception:
K, dist = approx_camera_matrix(w, h)
return K, dist, False
# =========================
# "절대 기울어짐" 계산 (Up-벡터 방식)
# =========================
def compute_tilt_deg_from_rvec(rvec):
"""
rvec: estimatePoseSingleMarkers에서 나온 rvec (마커->카메라 회전)
반환: tilt_deg (마커의 '수평으로 맞춘 up' 대비 카메라 up이 얼마나 꺾였는지)
"""
R_obj2cam, _ = cv2.Rodrigues(rvec) # marker(object) -> camera
R_cam2obj = R_obj2cam.T # camera -> marker
# OpenCV 카메라 좌표: x=오른쪽, y=아래, z=앞
# 카메라의 "위" 방향은 -Y
up_cam = np.array([0.0, -1.0, 0.0], dtype=np.float32)
# 카메라 up을 마커 좌표로 변환
up_obj = R_cam2obj @ up_cam
up_obj = up_obj / (np.linalg.norm(up_obj) + 1e-9)
# 마커를 "수평으로(윗변이 수평)" 붙였다고 가정하면,
# 마커 좌표계에서 '월드 up(중력 up)'을 -Y로 둘 수 있음
world_up_obj = np.array([0.0, -1.0, 0.0], dtype=np.float32)
cosang = float(np.clip(np.dot(up_obj, world_up_obj), -1.0, 1.0))
tilt_deg = float(np.degrees(np.arccos(cosang)))
return tilt_deg
# =========================
# 메인
# =========================
def main():
# ArUco 설정
aruco_dict = cv2.aruco.getPredefinedDictionary(MARKER_DICT)
params = cv2.aruco.DetectorParameters()
detector = cv2.aruco.ArucoDetector(aruco_dict, params)
# Tello 연결
tello = Tello()
tello.connect()
print("Battery:", tello.get_battery(), "%")
tello.streamon()
frame_read = tello.get_frame_read()
tilt_bias = None # 절대 0도 보정용(카메라 장착 오프셋). 'b'키로 설정.
while True:
frame = frame_read.frame
if frame is None:
continue
h, w = frame.shape[:2]
K, dist, calib_ok = load_calib_or_approx(w, h, CALIB_PATH)
gray = cv2.cvtColor(frame, cv2.COLOR_BGR2GRAY)
corners, ids, _ = detector.detectMarkers(gray)
status_text = "NO MARKER"
status_color = (0, 0, 255)
info_lines = [
f"Calib: {'OK' if calib_ok else 'APPROX'} ({CALIB_PATH})",
"Keys: ESC=quit, b=set_bias(level), r=reset_bias"
]
chosen_rvec = None
chosen_tvec = None
chosen_id = None
if ids is not None and len(ids) > 0:
ids_flat = ids.flatten().tolist()
cv2.aruco.drawDetectedMarkers(frame, corners, ids)
# 포즈 추정
rvecs, tvecs, _ = cv2.aruco.estimatePoseSingleMarkers(
corners, MARKER_SIZE_M, K, dist
)
# 사용할 마커 선택
idx = 0
if TARGET_ID is not None and TARGET_ID in ids_flat:
idx = ids_flat.index(TARGET_ID)
chosen_rvec = rvecs[idx][0]
chosen_tvec = tvecs[idx][0]
chosen_id = ids_flat[idx]
# 축 표시(선택)
cv2.drawFrameAxes(frame, K, dist, chosen_rvec, chosen_tvec, 0.08)
# 절대 기울기 계산
tilt_deg = compute_tilt_deg_from_rvec(chosen_rvec)
# bias 보정(선택: 카메라 장착 오프셋 제거)
if tilt_bias is None:
tilt_corr = tilt_deg
else:
tilt_corr = tilt_deg - tilt_bias
tilted = abs(tilt_corr) > TILT_THRESH_DEG
status_text = "TILTED" if tilted else "LEVEL"
status_color = (0, 0, 255) if tilted else (0, 255, 0)
info_lines.insert(0, f"IDs: {ids_flat} (using: {chosen_id})")
info_lines.append(f"tilt_raw = {tilt_deg:.2f} deg")
info_lines.append(f"tilt_corr= {tilt_corr:.2f} deg (thr={TILT_THRESH_DEG:.1f})")
info_lines.append(f"bias = {('None' if tilt_bias is None else f'{tilt_bias:.2f} deg')}")
# 상태 크게 표시
cv2.putText(frame, status_text, (10, 60),
cv2.FONT_HERSHEY_SIMPLEX, 1.6, (0, 0, 0), 6)
cv2.putText(frame, status_text, (10, 60),
cv2.FONT_HERSHEY_SIMPLEX, 1.6, status_color, 3)
# 정보 표시
y = 95
for line in info_lines:
cv2.putText(frame, line, (10, y),
cv2.FONT_HERSHEY_SIMPLEX, 0.7, (0, 0, 0), 4)
cv2.putText(frame, line, (10, y),
cv2.FONT_HERSHEY_SIMPLEX, 0.7, (255, 255, 255), 2)
y += 28
cv2.imshow("Tello ArUco Absolute Tilt", frame)
key = cv2.waitKey(1) & 0xFF
if key == 27: # ESC
break
elif key == ord('r'):
tilt_bias = None
print("Bias reset.")
elif key == ord('b'):
# 마커가 잡힌 상태에서만 bias 설정
if chosen_rvec is not None:
tilt_bias = compute_tilt_deg_from_rvec(chosen_rvec)
print(f"Bias set to {tilt_bias:.2f} deg (assumed LEVEL now).")
else:
print("No marker detected: cannot set bias.")
tello.streamoff()
cv2.destroyAllWindows()
if __name__ == "__main__":
main()'코딩 및 기타' 카테고리의 다른 글
| [tello] test 10 11 12 (0) | 2026.01.30 |
|---|---|
| [tello] test5 6 7 8 9 (0) | 2026.01.30 |
| [isaac sim] ROS2 tutorials 3 (0) | 2026.01.16 |
| [isaac sim] ROS2 tutorials 2 (0) | 2026.01.15 |
| [isaac sim] ROS2 tutorials 1 (0) | 2026.01.13 |