https://docs.nav2.org/setup_guides/urdf/setup_urdf.html#
Setting Up The URDF — Nav2 1.0.0 documentation
Note Note that you will also be setting up a SDF for simulation in Gazebo in the next tutorials. URDF is used to set up the robot frames and describe the robot’s structure for run-time use on hardware and possibly in simulation. SDF is a specific file fo
docs.nav2.org
- 해당되는 튜토리얼에서는 URDF파일을 이용하여 간단한 differential drive robot을 만들어 볼것이다.
- 또한 로봇의 state publisher와 RVIZ 시각화를 위한 세팅도 할 것이다.
- 마지막에는 시뮬레이션이라는 목적에 맞게, kinematic 속성을 urdf파일에 추가할 것 이다.
- 이러한 과정들은 네비게이션에서 센서,hw,robot transform을 사용하기 위해서 필요하다.
- 우리는 https://jihong.tistory.com/591의 튜토리얼에서 말했듯이, nav2를 사용하기 위해서는 base_link에서 다양한 센서들을 기준 좌표 프레임으로의 transform이 필요합니다.
- transform tree는 단순하게 링크가 1개몬 존재하는 구조일수 있으며( base_link --> laser_link ), 여러 위치에 여러 센서들이 각각의 좌표프레임을 가진 상태로 설치되어 있는 복잡한 구조일 수도 있다.
- 이러한 모든 좌표의 변환을 처리하기 위해서 publisher를 각각 만드는 것은 번거러울 것이다. 그래서 우리는 Robot_state_Publisher 패키지를 사용해서 publish할 것이다.
- ROS_State_Publisher
- ROS2의 패키지이다.
- tf 패키지와 상호작용하며 로봇의 기하학적 구조로부터 직접 유추할 수 있는 모든 필요한 좌표 변환을 publish한다.
- 해당 패키지에 올바른 URDF파일을 제공하면, transform publish를 자동으로 해준다.

1. URDF 파일 생성

- 우선 로봇 본체의 크기를 정의한다. base_link의 가로 세로 높이이다.

- 바퀴의 반지름 , 바퀴 두께 , 바퀴와 본체 사이의 y축 거리 , 바닥을 기준으로 바닥의 높이 , 바퀴의 x축 위치

- 앞쪽 캐스터의 x축 위치이다. 캐스터는 회전이 가능한 바퀴이다.

- link는 로봇의 물리적 구성요소이다.
- visual은 gazebo에서 보이게 될 3d모양
- geometry는 박스 형상
- material에서 색상을 지정중

- 시뮬레이션 상에서는 보이지 않는 가상의 링크이다. 로봇이 바닥에 투영되었을때 중심점 역할을 수행

- fixed 조인트로 base_link와 base_footprint를 연결한다.
- z축의 위치는 로봇 바닥이 지면에 닿도록 설정한다. ${ -( wheel_radius + wheel_zoof ) }
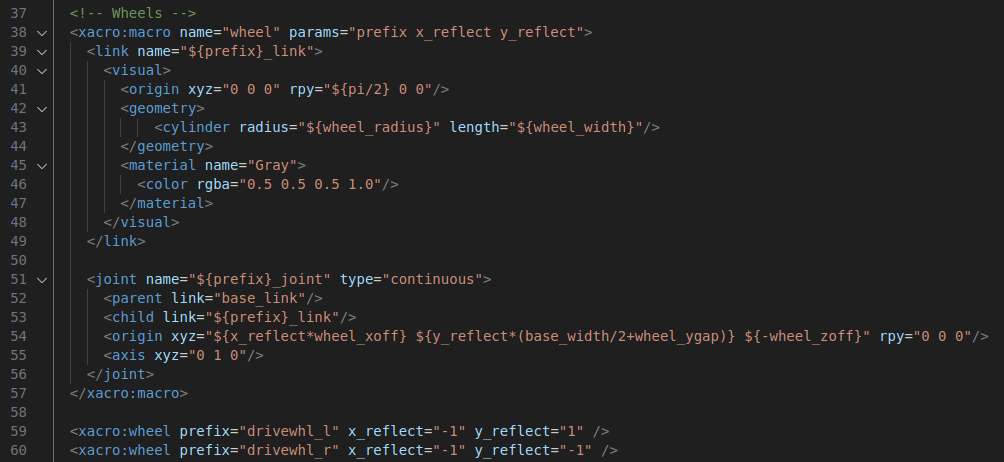
- 바퀴 생성을 위한 매크로를 정의
- params에서 'prefix는 바퀴 이름 앞에 붙일 식별자'이며 'x_reflect와 y_reflect'는 x,y축을 기준으로 좌우/앞뒤 대칭 위치를 계산
- 바퀴는 원통형으로 정의하며, rpy로 x축을 중심으로 90도 회전 시켜서 바퀴가 y축을 따라서 회전하도록 설정
- joint는 continuos로 회전이 가능하게
- axis는 y축을 기준으로 회전함을 의미
<?xml version="1.0"?>
<robot name="sam_bot" xmlns:xacro="http://ros.org/wiki/xacro">
<!-- Define robot constants -->
<xacro:property name="base_width" value="0.31"/>
<xacro:property name="base_length" value="0.42"/>
<xacro:property name="base_height" value="0.18"/>
<xacro:property name="wheel_radius" value="0.10"/>
<xacro:property name="wheel_width" value="0.04"/>
<xacro:property name="wheel_ygap" value="0.025"/>
<xacro:property name="wheel_zoff" value="0.05"/>
<xacro:property name="wheel_xoff" value="0.12"/>
<xacro:property name="caster_xoff" value="0.14"/>
<!-- Robot Base -->
<link name="base_link">
<visual>
<geometry>
<box size="${base_length} ${base_width} ${base_height}"/>
</geometry>
<material name="Cyan">
<color rgba="0 1.0 1.0 1.0"/>
</material>
</visual>
</link>
<!-- Robot Footprint -->
<link name="base_footprint"/>
<joint name="base_joint" type="fixed">
<parent link="base_link"/>
<child link="base_footprint"/>
<origin xyz="0.0 0.0 ${-(wheel_radius+wheel_zoff)}" rpy="0 0 0"/>
</joint>
<!-- Wheels -->
<xacro:macro name="wheel" params="prefix x_reflect y_reflect">
<link name="${prefix}_link">
<visual>
<origin xyz="0 0 0" rpy="${pi/2} 0 0"/>
<geometry>
<cylinder radius="${wheel_radius}" length="${wheel_width}"/>
</geometry>
<material name="Gray">
<color rgba="0.5 0.5 0.5 1.0"/>
</material>
</visual>
</link>
<joint name="${prefix}_joint" type="continuous">
<parent link="base_link"/>
<child link="${prefix}_link"/>
<origin xyz="${x_reflect*wheel_xoff} ${y_reflect*(base_width/2+wheel_ygap)} ${-wheel_zoff}" rpy="0 0 0"/>
<axis xyz="0 1 0"/>
</joint>
</xacro:macro>
<xacro:wheel prefix="drivewhl_l" x_reflect="-1" y_reflect="1" />
<xacro:wheel prefix="drivewhl_r" x_reflect="-1" y_reflect="-1" />
<!-- Caster Wheel -->
<link name="front_caster">
<visual>
<geometry>
<sphere radius="${(wheel_radius+wheel_zoff-(base_height/2))}"/>
</geometry>
<material name="Cyan">
<color rgba="0 1.0 1.0 1.0"/>
</material>
</visual>
</link>
<joint name="caster_joint" type="fixed">
<parent link="base_link"/>
<child link="front_caster"/>
<origin xyz="${caster_xoff} 0.0 ${-(base_height/2)}" rpy="0 0 0"/>
</joint>
</robot>2. launch파일
from launch import LaunchDescription
from launch.actions import DeclareLaunchArgument
from launch.conditions import IfCondition, UnlessCondition
from launch.substitutions import Command, LaunchConfiguration
from launch_ros.actions import Node
from launch_ros.substitutions import FindPackageShare
import os
def generate_launch_description():
# sam_bot_description이라는 ros 패키지에서 공유 디렉토리 경로를 찾는다.
pkg_share = FindPackageShare(package='sam_bot_description').find('sam_bot_description')
# 로봇 모델 URDF 파일의 기본 경로를 정의
default_model_path = os.path.join(pkg_share, 'src', 'description', 'sam_bot_description.urdf')
# rviz 설정 파일의 경로를 정의
default_rviz_config_path = os.path.join(pkg_share, 'rviz', 'config.rviz')
# robot_state_publisher 노드를 정의합니다.
robot_state_publisher_node = Node(
package='robot_state_publisher', # 패키지 이름 ( 반드시 실존하는 ros패키지 이름 명시)
executable='robot_state_publisher', # 실행할 노드 이름 ( 위의 package안에 있는 실행 파일 이름을 지정)
# parameters는 노드를 실행할때 전달할 파라미터 목록이다.
parameters=[{'robot_description': Command(['xacro ', LaunchConfiguration('model')])}]
)
joint_state_publisher_node = Node(
package='joint_state_publisher',
executable='joint_state_publisher',
name='joint_state_publisher',
parameters=[{'robot_description': Command(['xacro ', default_model_path])}],
condition=UnlessCondition(LaunchConfiguration('gui'))
)
joint_state_publisher_gui_node = Node(
package='joint_state_publisher_gui',
executable='joint_state_publisher_gui',
name='joint_state_publisher_gui',
condition=IfCondition(LaunchConfiguration('gui'))
)
rviz_node = Node(
package='rviz2',
executable='rviz2',
name='rviz2',
output='screen',
arguments=['-d', LaunchConfiguration('rvizconfig')],
)
# 최종적으로 launchDescription 객체를 생성하여, 모든 액션을 리스트로 반환
return LaunchDescription([
# gui인자 선언
DeclareLaunchArgument(name='gui', default_value='True', description='Flag to enable joint_state_publisher_gui'),
# model 이자를 선언
DeclareLaunchArgument(name='model', default_value=default_model_path, description='Absolute path to robot model file'),
# rviz 설정
DeclareLaunchArgument(name='rvizconfig', default_value=default_rviz_config_path, description='Absolute path to rviz config file'),
joint_state_publisher_node,
joint_state_publisher_gui_node,
robot_state_publisher_node,
rviz_node
])
3. package.xml 수정
<exec_depend>joint_state_publisher</exec_depend>
<exec_depend>joint_state_publisher_gui</exec_depend>
<exec_depend>robot_state_publisher</exec_depend>
<exec_depend>rviz</exec_depend>
<exec_depend>xacro</exec_depend>
4. rviz.config 생성
Panels:
- Class: rviz_common/Displays
Help Height: 78
Name: Displays
Property Tree Widget:
Expanded:
- /Global Options1
- /Status1
- /RobotModel1/Links1
- /TF1
Splitter Ratio: 0.5
Tree Height: 557
Visualization Manager:
Class: ""
Displays:
- Alpha: 0.5
Cell Size: 1
Class: rviz_default_plugins/Grid
Color: 160; 160; 164
Enabled: true
Name: Grid
- Alpha: 0.6
Class: rviz_default_plugins/RobotModel
Description Topic:
Depth: 5
Durability Policy: Volatile
History Policy: Keep Last
Reliability Policy: Reliable
Value: /robot_description
Enabled: true
Name: RobotModel
Visual Enabled: true
- Class: rviz_default_plugins/TF
Enabled: true
Name: TF
Marker Scale: 0.3
Show Arrows: true
Show Axes: true
Show Names: true
Enabled: true
Global Options:
Background Color: 48; 48; 48
Fixed Frame: base_link
Frame Rate: 30
Name: root
Tools:
- Class: rviz_default_plugins/Interact
Hide Inactive Objects: true
- Class: rviz_default_plugins/MoveCamera
- Class: rviz_default_plugins/Select
- Class: rviz_default_plugins/FocusCamera
- Class: rviz_default_plugins/Measure
Line color: 128; 128; 0
Transformation:
Current:
Class: rviz_default_plugins/TF
Value: true
Views:
Current:
Class: rviz_default_plugins/Orbit
Name: Current View
Target Frame: <Fixed Frame>
Value: Orbit (rviz)
Saved: ~5. CMakeList.txt에 다음 내용 추가
install(
DIRECTORY src launch rviz
DESTINATION share/${PROJECT_NAME}
)
colcon build
. install/setup.bash
ros2 launch sam_bot_description display.launch.py
'gazebo > Nav2' 카테고리의 다른 글
| nav2 - Writing a New Costmap2D Plugin (0) | 2025.05.10 |
|---|---|
| nav2 - Setting Up Odometry - Gazebo (0) | 2025.04.17 |
| nav2 - (STVL) Using an External Costmap Plugin (0) | 2025.04.03 |
| nav2 - (SLAM) Navigating While Mapping (0) | 2025.04.03 |
| nav2 - Setting Up Transformations (1) | 2025.04.01 |