1. 우선 아래 명령어로 gazebo를 실행시킨다.
ros2 launch turtlebot4_gz_bringup turtlebot4_gz.launch.py
2. 키보드 조작을 위해서 다음 명령어 실행
ros2 run teleop_twist_keyboard teleop_twist_keyboard --ros-args -p stamped:=true
3. rivz실행
rviz2
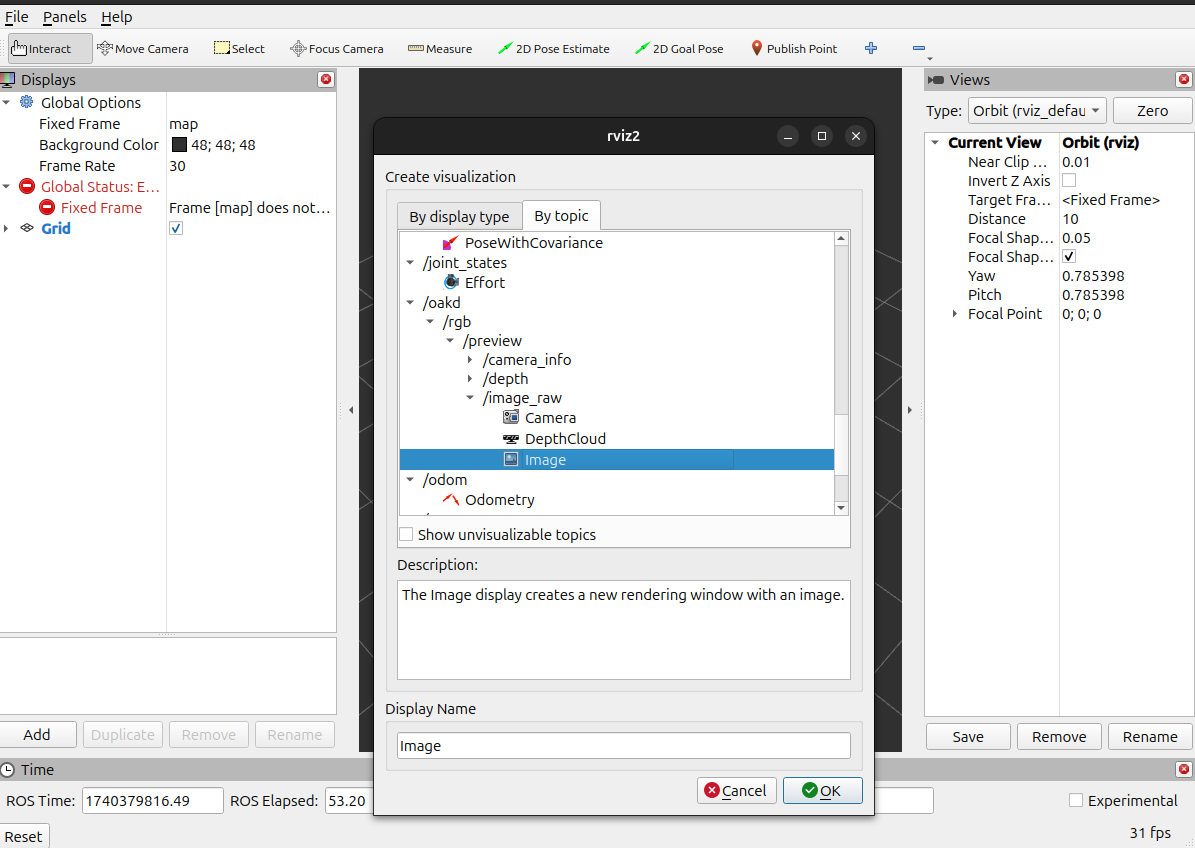
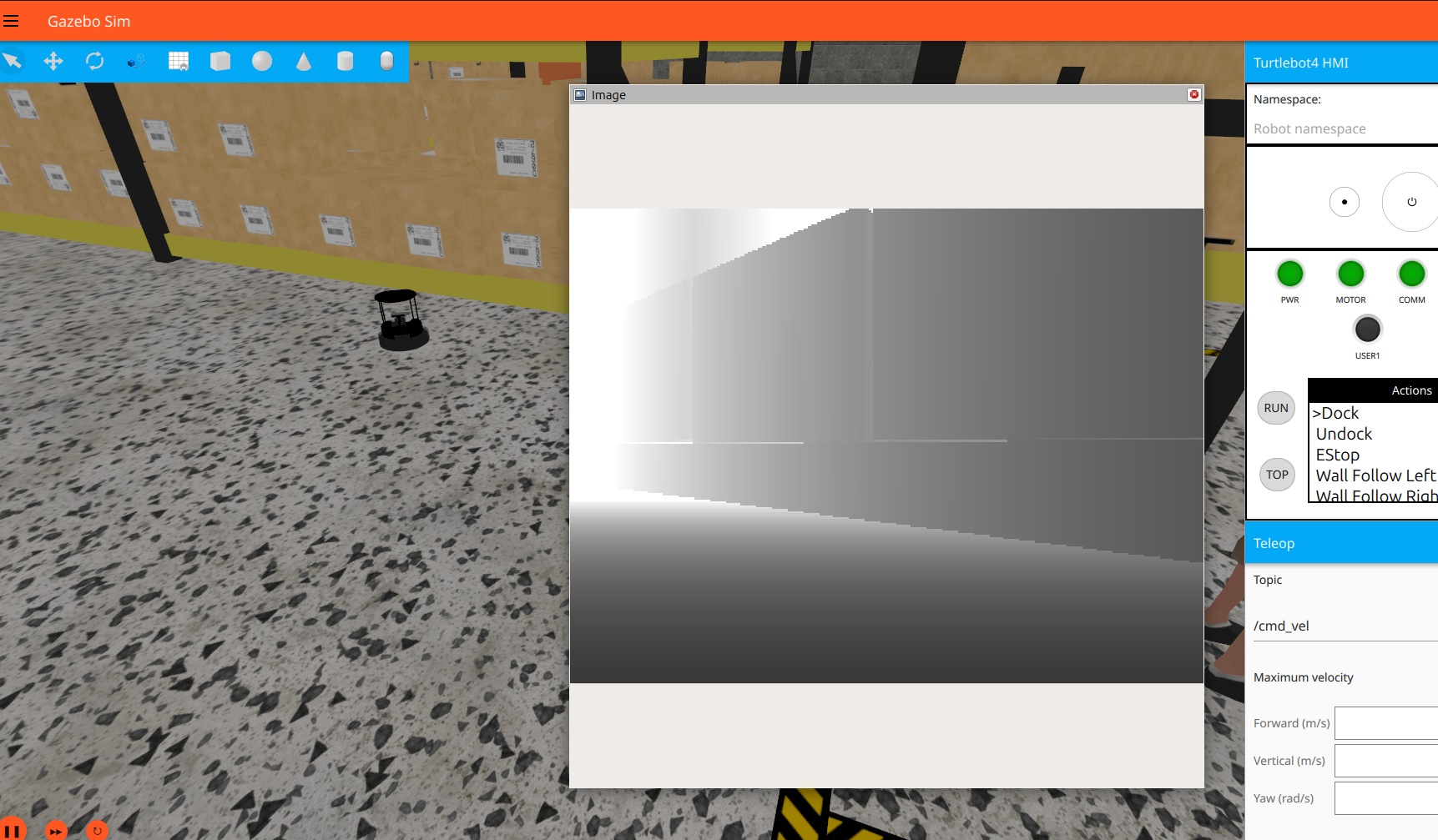
4, add -> by topic -> oakd -> rgb/preview/image_raw에서 image선택

'ROS 2' 카테고리의 다른 글
| ROS2에서 TF란? (0) | 2025.03.14 |
|---|---|
| ROS 2 Tutorials : Creating custom msg and srv files (0) | 2025.02.27 |
| ROS2 turtlebot4을 gazebo sim에 띄워보기 (0) | 2025.02.23 |
| Launch file (0) | 2025.02.05 |
| URDF : Using URDF with robot_state_publisher (1) | 2025.02.04 |