Improved RRT-Connect Algorithm Based on Triangular Inequality for Robot Path Planning
Improved RRT-Connect Algorithm Based on Triangular Inequality for Robot Path Planning
This paper proposed a triangular inequality-based rewiring method for the rapidly exploring random tree (RRT)-Connect robot path-planning algorithm that guarantees the planning time compared to the RRT algorithm, to bring it closer to the optimum. To check
www.mdpi.com
0.Abstract
- 본 논문에서는 Triangular inequality기반의 rewiring(리와이어링, 재연결)기법을 빠르게 탐색하는 RRT-Connect에 도입하여, 기존 RRT 알고리즘과 비교했을 때 계획 시간을 보장하면서도 최적에 더 가깝게 만드는 방법을 제안한다.
-
제안된 알고리즘의 성능을 검증하기 위해 다양한 환경에서 시뮬레이션을 통해 RRT 알고리즘과 RRT-Connect 알고리즘을 비교하였다.
실험 결과, 제안된 알고리즘은 RRT 알고리즘에 비해 더 빠른 계획 시간과 짧은 경로 길이를 보였으며, 샘플 수와 계획 시간이 유사할 때 RRT-Connect 알고리즘보다도 더 짧은 경로 길이를 달성하였다.
1. Introduction
- 제4차 산업혁명이 도래함에 따라 로봇 공학, 스마트 팩토리, 자율 주행 등 다양한 분야에서 이동 로봇에 대한 관심이 증가하고 있다[1]. 고전적인 이동 로봇 경로 계획 알고리즘은 크게 세 가지 범주로 분류할 수 있다[2].
- 첫째는 로드맵 접근법 알고리즘[3]으로, 이동 가능한 경로를 나타내는 지도를 설계하고 이를 통해 경로를 계획하는 방식으로 구현이 용이하다.
- 둘째는 셀 분할(cell decomposition) 알고리즘[4]로, 구성 공간을 셀 단위로 분할한 뒤 그래프를 이용해 각 셀을 연결하여 경로를 생성한다.
- 셋째는 인공 퍼텐셜 필드(artificial potential field) 알고리즘[5]로, 인공 퍼텐셜 필드를 생성하고 퍼텐셜의 흐름에 따라 로봇을 목표 지점으로 유도한다.
- '최적성(optimality)’은 항상 최적 경로를 보장한다는 의미이고,
‘안전 거리(clearance)’는 장애물과 로봇 간의 충돌 확률이 낮음을,
‘완전성(completeness)’은 경로가 존재할 경우 반드시 경로를 찾을 수 있음을 뜻한다.
==> 이러한 고전 알고리즘에서는 최적성, 안전 거리, 완전성이 중요한 연구 주제였으며[6], 특히 알고리즘이 완전성을 보장하지 못하면 유한 시간 내에 경로를 찾지 못하는 치명적인 문제가 발생할 수 있다.
- 최근에는 샘플링 기반(path-planning) 알고리즘[7–12], 그중에서도 빠르게 탐색하는 RRT[13]가 고전 알고리즘보다 빠르고 계산 부담이 적어 주목받고 있다.
- 샘플링 기반 알고리즘의 주요 목적은 '무작위로 추출한 샘플 점(random sampling)'을 이용해 목표 지점으로 빠르게 도달할 수 있는 경로를 찾는 것이다.
고전 알고리즘과 달리 샘플링 기반 알고리즘은 최적성과 완전성을 완전히 보장하기 어렵기 때문에, 대부분 ‘확률적 완전성(probabilistic completeness)’을 주장하며, 이는 무한히 반복되는 샘플링을 통해 확률적으로 완전성에 근접할 수 있다는 의미이다[14].
==> 이로 인해 계획 시간(planning time)의 보장과 첫 번째 경로 발견 이후 반복 샘플링을 통해 경로를 최적에 가깝게 수렴시키는 ‘수렴 속도(convergence rate)’를 보장하기 어렵다.
- 특히 동적 환경에서는 계획할 충분한 시간이 주어지지 않을 경우라면, 최적 경로와 차이가 큰 경로가 생성될 수 있다.
- 그럼에도 샘플링 기반 알고리즘은 고전 알고리즘에 비해 매우 짧은 계획 시간을 제공하여 동적 환경에서 주로 사용된다.
- 특히 동적 환경에서는 계획할 충분한 시간이 주어지지 않을 경우라면, 최적 경로와 차이가 큰 경로가 생성될 수 있다.
- 샘플링 기반 알고리즘의 주요 목적은 '무작위로 추출한 샘플 점(random sampling)'을 이용해 목표 지점으로 빠르게 도달할 수 있는 경로를 찾는 것이다.
- 계획 시간과 수렴 속도의 한계를 극복하기 위해 RRT 알고리즘의 확장을 다룬 연구들이 활발히 진행되고 있다.
- RRT - Connect 는 start과 goal을 각각 트리의 뿌리(root)로 설정한 뒤, 두 트리를 번갈아 확장함으로써 RRT보다 더 빠르게 경로를 연결한다.
- 또한 RRT*-smart나 Quick-RRT*[17]와 같이 삼각부등식에 기반해 경로를 최적화하는 알고리즘도 제안되어 최적 경로에 가까운 결과를 도출한다. 이 외에도 다양한 RRT 확장 알고리즘[18–21]이 연구되었다.
- 그러나 위 알고리즘들은 샘플링 기반 방식의 한계를 어느 정도 극복했음에도 여전히 완전한 최적 경로 산출이 어렵고, 연산량과 소요 시간 측면에서 개선의 여지가 남아 있다.
- RRT*[18] 알고리즘은 새로 삽입된 노드 주변의 이웃 노드를 탐색(neighbor search)하고, 추가된 경로 길이가 최적화되는 조상 노드(via point)를 찾아 리와이어링(rewiring)하는 과정을 거쳐 RRT보다 짧은 경로를 얻는다.
- 그러나 이 과정에서 수렴 속도가 개선되는 반면 계획 시간이 크게 증가하는 효율성 trade - off가 발생한다[22].
- ==> 따라서 RRT*는 계획 시간 및 다른 성능 지표를 모두 고려할 때 항상 RRT보다 우수하다고 할 수 없으며, 계획 시간을 희생하고서야 최적에 접근한다고 볼 수 있다.
- 본 논문은 계획 시간을 희생하지 않으면서도 리와이어링을 통해 최적화를 추구하기 위해, RRT-Connect를 기반으로 삼각부등식 원리를 적용한 조상 노드 탐색 방식을 제안한다.
- 이 방식은 "출발점에서 via point까지의 경로 길이"와 "via point에서 새로 삽입된 노드까지의 경로 길이 합"이 가장 최적화되도록 삼각부등식을 활용하여 경로를 재연결한다.
- 제안된 알고리즘은 RRT-Connect의 빠른 경로 연결 특성을 유지하면서도 리와이어링을 통해 경로 최적화를 추구하여 계획 시간을 단축한다.
- 또한 다양한 시뮬레이션 실험을 통해 기존 RRT 및 RRT-Connect 알고리즘과의 성능을 비교·검증하였다.
- 그 결과, 제안 알고리즘은 샘플 수나 계획 시간을 희생하지 않으면서 RRT 및 RRT-Connect보다 더 짧은 경로를 제공함을 확인하였다.

- 본 연구의 범위는 "경로를 얼마나 빠르게 찾을 수 있는지"와 "얼마나 더 짧은 경로를 생성할 수 있는지"에 초점을 맞춘다.
- 동적 환경에서는 네비게이션 가능한 경로를 빠르게 찾는 것이 중요하며, 충분한 수렴 시간이 확보되지 않을 수 있기 때문이다.
- 즉, 본 논문의 목적은 RRT-Connect 알고리즘을 개선하여 동일한 계획 시간 내에 더 짧은 경로를 찾을 수 있도록 하는 것이다.
- figure1은 본 논문에서 다루는 세 가지 주요 알고리즘(RRT, RRT-Connect, 제안 알고리즘)의 개요를 보여준다.
- 그림 1-a의 RRT는 트리 구조로 확장되는 과정을, 그림 1-b의 RRT-Connect는 출발점과 목표점에서 확장된 두 트리가 서로를 향해 확장되어 연결되는 과정을, 그림 1-c의 제안 알고리즘은 경로 계획 중 RRT-Connect에 삼각부등식 기반의 리와이어링을 적용한 과정을 나타낸다.
- 본 논문의 구성은 다음과 같다.
- 2장에서는 RRT 알고리즘을, 3장에서는 RRT-Connect 알고리즘을 소개하며, 4장에서는 삼각부등식 기반 RRT-Connect 알고리즘을 제안한다.
- 구체적으로 4.1절에서는 제안된 리와이어링 기법의 의사코드를,
4.2절에서는 제안 알고리즘의 수학적 모델링을,
4.3절과 4.4절에서는 제안 기법을 적용한 RRT-Connect 각 단계의 의사코드를, 4.5절에서는 제안 알고리즘의 전체 경로 계획 과정을 설명한다. - 5장에서는 실험 환경 및 결과를 제시하고, 6장에서 결론을 맺는다.
- 구체적으로 4.1절에서는 제안된 리와이어링 기법의 의사코드를,
- 2장에서는 RRT 알고리즘을, 3장에서는 RRT-Connect 알고리즘을 소개하며, 4장에서는 삼각부등식 기반 RRT-Connect 알고리즘을 제안한다.
2. RRT

- figure2-a
- 1. q_rand를 샘플링하였다.
- 2. T라는 트리에서 q_rand와 가장 가까운 노드인 q_near을 찾았다.
- 3. q_rand방향으로 설정해둔 거리만큼 이동한 곳에 q_new를 설정하고, collision check를 하고, collision이 없다면 트리T에 삽입한다.
- figure2-b
- 위의 과정을 거쳐서 q_goal에 도달하면 최종적인 path가 만들어진다.
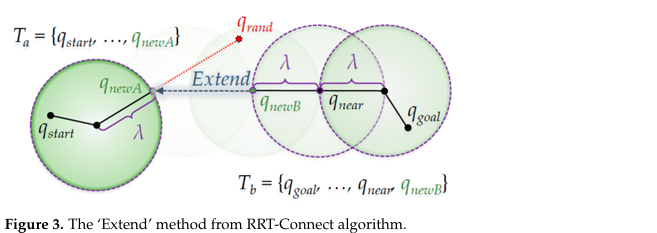
3. RRT-Connect


4 - 0. Proposed Triangular Inequality-Based RRT-Connect Algorithm
- 제안된 삼각부등식 기반 RRT-Connect알고리즘은 RRT-Connect 알고리즘으로 계획된 경로 상의 노드들 사이에 삼각부등식 원리를 적용한 리와이어링 기법으로, 기존 RRT-Connect보다 최적 경로에 더 가깝게 수렴한다.
- 이는 RRT 알고리즘에 삼각부등식 원리를 적용해 경로를 단축하는 RRT*-Smart[16] 및 Quick-RRT*[17] 알고리즘과 유사하며, 본 논문에서는 이 리와이어링 기법을 ‘Triangular-Rewiring’이라 칭한다.
- 제안된 알고리즘은 다음 두 가지 가정을 전제로 한다
- 1. 출발점(start point)은 하나이며, 목표점(goal point) 역시 하나이지만 시간이 지남에 따라 목표점이 점진적으로 변경될 수 있다.
- 2. 로봇은 전방향성(omnidirectional) 운동이 가능하다.
- 따라서 이 장에서는 먼저 RRT-Connect 알고리즘에 적용할 ‘Triangular-Rewiring’ 기법을 소개하고, 이 기법이 항상 경로를 단축함을 수학적으로 모델링하여 타당성을 검증한다.
- 검증이 완료되면, ‘Triangular-Rewiring’기법을 RRT-Connect에 실제로 적용하는 방법을 제안한다.
- 구체적으로, 제안된 기법은 3장에서 소개한 RRT-Connect 알고리즘의 주요 절차인 ‘Extend’ 메서드와 ‘Connect’ 메서드에서 새로운 노드를 트리에 삽입할 때마다 적용된다.
- 노드 삽입은 우선 ‘Triangular-Rewiring’기법으로 리와이어링(혹은 적용 여부 결정)을 수행한 뒤 이루어지며, 이 장에서는 이 과정을 반영한 ‘Extend’ 및 ‘Connect’ 메서드의 의사코드를 제시한다.
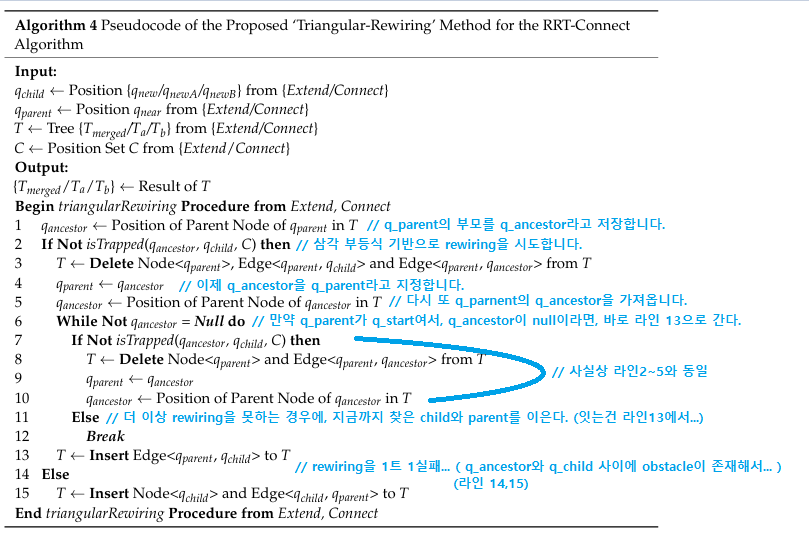
4 - 1. Pseudocode of the Proposed Triangular-Rewiring Method for the Improved RRT-Connect Algorithm
- ‘Triangular-Rewiring’은 RRT-Connect의 ‘Extend’와 ‘Connect’단계에서 새로운 노드가 삽입될 때마다 호출된다.
- 1. 노드 삽입 준비
- 1-1. q_new( 혹은 q_newA , q_newB )를 자식 노드( q_child )설정한다.
- 1-2. 자식노드(q_child)와 연결된 기존 노드(q_near)를 부모 노드 후보(q_parent)로 설정한다.
- 1-3. q_parent의 부모 노드를 다시 한 단계 위 조상 노드(q_ancestor)로 불러온다.
- 2. 충돌 검사
- 2-1. isTrapped( q_ancestor , q_child )로 q_ancestor와 q_child사이에 장애물이 있는지 검사한다.
- 2-2. obstacle이 있으면(참) 리와이어링을 건너뛰고, 기존 RRT-Connect처럼 q_parent를 q_child의 부모로 고정 삽입한다. 장애물이 없으면(거짓) 다음 리와이어링 단계로 진행한다( 다음 단계에서는 triangular-rewiring을 진행 ).
- 3. Triangular - Rewiring 수행
- 3-1. q_parent와 q_child사이의 간선, 그리고 q_parent와 q_ancestor사이의 간선을 삭제해 기존 연결을 끊는다.
- 3-2. q_child를 q_ancestor의 자식으로, q_ancestor를 그 위 조상의 자식으로 차례로 재연결한다. (증조할아버지 )
- 3-3. 다시 isTrapped( q_ancestor , q_child )를 호출하여 장애물 유무를 확인하고, 장애물이 없을 경우 더 높은 조상까지 같은 과정을 반복한다.
- 3-4. 더 이상 조상이 없거나(=조상이 출발점), 장애물이 발견되면 마지막으로 연결했던 q_parent를 q_child의 부모로 확정 삽입한다.
- ==> 위의 1,2,3과정을 통해서 각 삽입 시점마다 가능한 최단 경로로 리와이어링을 시도한다.
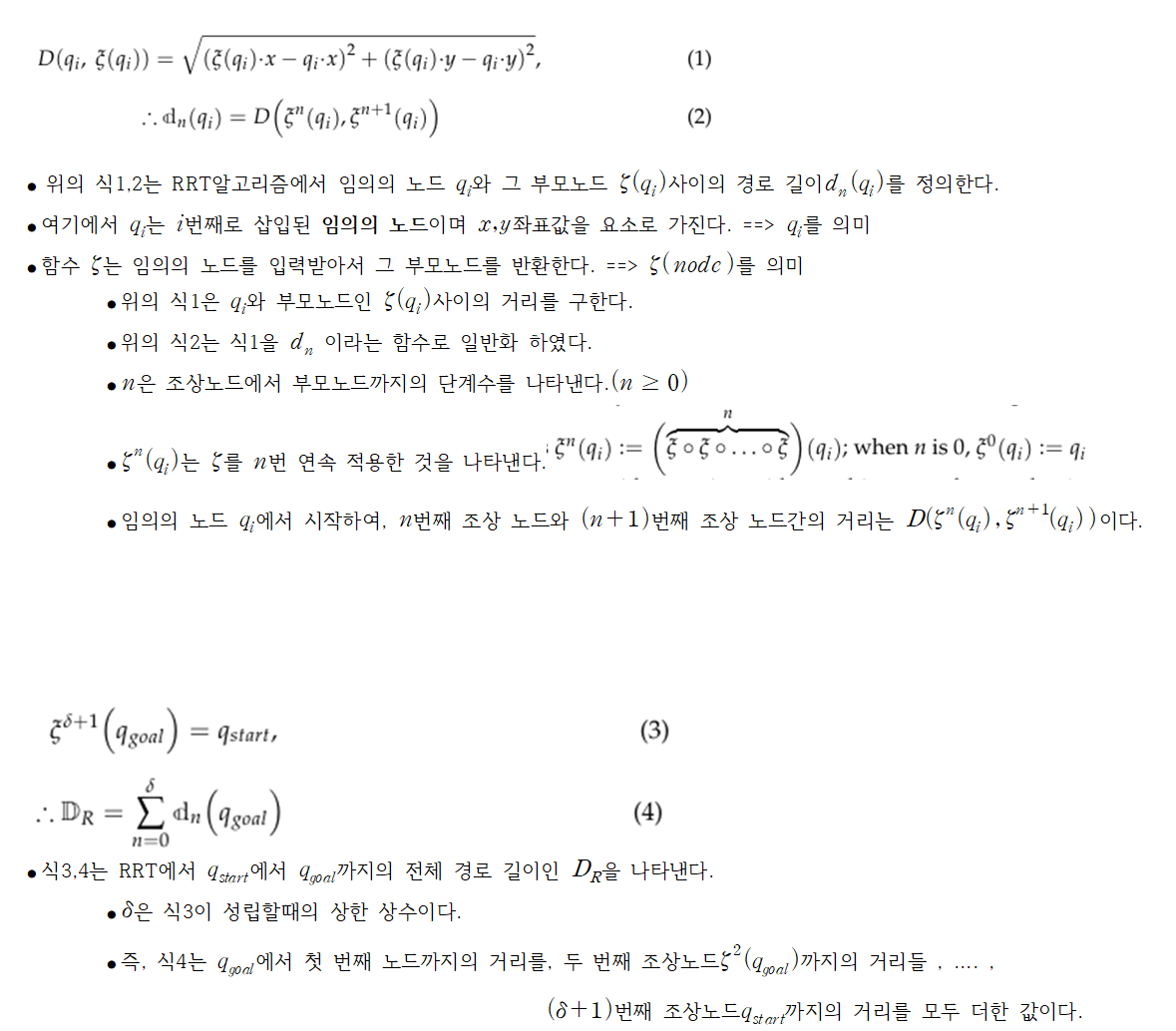
4 - 2. Mathematical Modeling of the Proposed Triangular Inequality-Based RRT - Connect Algorithm
- 본절에서는 2차원 유클리드 공간을 가정하여, 제안된 삼각 부등식 기반 RRT-Connect의 수학적 모델링을 소개한다.
- 제안된 알고리즘은 경로 길이 면에서 RRT-Connect 알고리즘보다 효율적임을 보인다.


- a는 예제 트리
- b는 q_child와 q_ancestor 사이를 rewiring한 후이다.
- c에서 alpha는 q_child와 q_parent사이의 거리이다.
beta는 q_parent와 q_ancestor사이의 거리이다.
gamma는 q_child와 q_ancestor사이 거리이다.- ==> 다음과 같은 식 성립. α + β ≥ γ
- 식7,8
- 이것은 조상 노드사이의 거리 과계를 나타내는 식이다.



- 식 (9)–(15)는 ‘Triangular-Rewiring’ 기법을 적용한 RRT 알고리즘의 경로가 원래 RRT-Connect 알고리즘이 계획한 경로보다 항상 짧거나 같음을 보인다.
- 식 (9)는 rewiring을 적용했을 때의 거리 와 적용하지 않았을 때의 거리 를 비교하기 위한 수열 지표 k_j를 정의한다.
- 위에서 j는 u에 대한 수열 인덱스이다.
- ==> 따라서 k_j도 d에 대한 수열 인덱스이다.
- 는 번째 단계에서 rewiring이 일어난 횟수입니다.
- 식(10)은 임의의 노드 q_i에 대해서, 식1을 일반화하면, rewiring후의 거리를 나타낸다.
- 위의 그림 5 에서 과 j=1일 때, 각각 한 번씩 rewiring(τ0=1)이 일어나면, 식 (8)의 삼각 부등식 관계를 이용하여, 식11이 성립함을 보일수있다.
- 그리고 이를 일반화하면 식12가 된다.

4 - 3. Pseudocode of Proposed Extend Method for the Improved RRT-Connect Algorithm
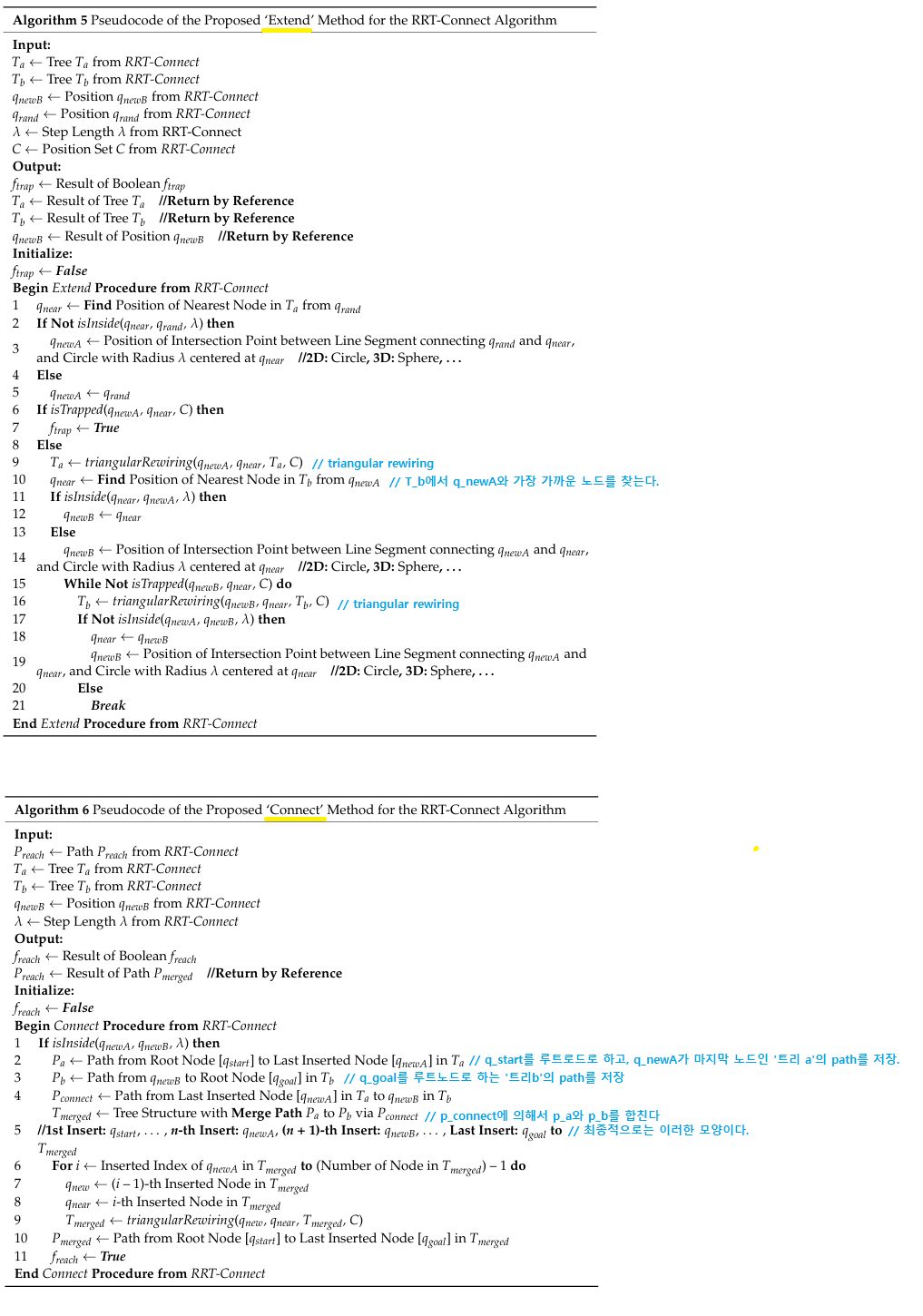
- 이 절에서는 제안된 삼각부등식 기반 RRT-Connect 알고리즘의 ‘Extend’ 메서드(A5)를 소개한다.
- 제안된 ‘Extend’ 메서드(A5)는 RRT-Connect 알고리즘의 기존 ‘Extend’ 메서드(A3)를 대체한다.
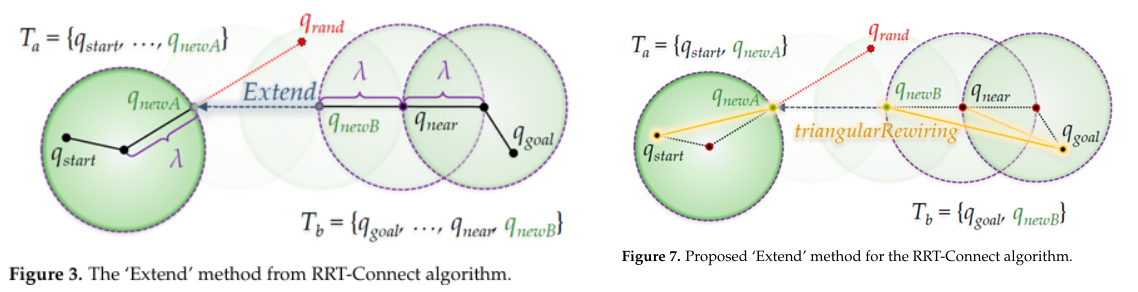
- 그림 7은 'RRT-Connect 알고리즘의 ‘Extend’ 메서드를 보여주는 그림 3'에 ‘Triangular-Rewiring’ 기법을 적용한 과정을 나타낸다.
- T_a쪽에서는 q_newA와 q_start가, T_b에서는 T_a로 확장하는 과정에서는 q_near와 q_goal, 그리고 q_newB와 q_goal이 순차적으로 리와이어링된다.
- Algorithm 5는 RRT-Connect 알고리즘의 원래 ‘Extend’ 메서드(A2)에 ‘Triangular-Rewiring’ 기법(A4)을 적용한 것이다.
- 원본 ‘Extend’ 메서드와 비교했을 때, 트리에 노드를 새로 삽입하는 부분(9 행 및 16 행)이 ‘Triangular-Rewiring’ 기법으로 대체된 것 외에는 모두 동일하다.
4 - 4. Pseudocode of the Proposed Connect Method for the RRT-Connect Algorithm
- 이 절에서는 제안된 삼각부등식 기반 RRT-Connect 알고리즘의 ‘Connect’ 메서드(A6)를 소개한다.
- 제안된 ‘Connect’ 메서드(A6)는 RRT-Connect 알고리즘의 기존 ‘Connect’ 메서드(A4)를 대체한다.
- Algorithm 6은 RRT-Connect의 원래 ‘Connect’ 메서드(A3)에 ‘Triangular-Rewiring’ 기법(A4)을 적용한 것이다.
- 원본 ‘Connect’ 메서드와 비교했을 때, 경로를 병합할 때(5–10행) ‘Triangular-Rewiring’ 기법을 적용하도록 변경된 부분을 제외하면 나머지는 모두 동일하다.
- 1.경로 병합
- P_a와 P_b경로가 트리 구조로 병합되는 시점(5행)에, 병합된 트리 T_merged에 다음 순서로 노드를 삽입한다:
- 시작 트리(T_a)의 경로 P_a
- 연결 엣지(P_connect)
- 목표 트리(T_b)의 경로 P_b
- 이때 T_merged의 루트 노드는 q_start가 되며, T_a의 마지막 삽입 노드 q_newA가 n번째로 삽입되면, 그 다음(n+1번째)으로 T_b의 마지막 삽입 노드 q_newB가 들어온다. 최종적으로 q_goal로 삽입을 마친다.
- P_a와 P_b경로가 트리 구조로 병합되는 시점(5행)에, 병합된 트리 T_merged에 다음 순서로 노드를 삽입한다:
- 2. Triangular-Rewiring 적용
- 병합된 트리 자체에 ‘Triangular-Rewiring’을 수행한다.
- 이미 T_a의 extend단계에서 rewiring을 마친 노드는 재검사할 필요가 없으므로, T_merged에 삽입된 노드들 중 q_newA 이후로 삽입된 T_b부분만을 대상으로 rewiring을 진행한다.
- 구체적으로, q_newA가 i번째 삽입 노드라면, (i+1)번째 노드 pair(q_child, q_parent)부터 시작하여 순차적으로 장애물이 없는지 검사하고, 가능하면 rewiring을 수행한다.
- 3. 종료 조건 및 경로 추출
- T_merged에 삽입된 모든 노드에 대해 rewiring을 시도한 후, 최종 트리 구조를 경로 P_merged로 변환하고 메서드를 종료(True를 반환).
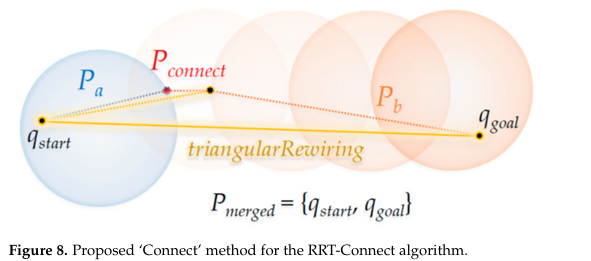
- 그림 8은 RRT-Connect의 ‘Connect’ 메서드(그림 4)에 ‘Triangular-Rewiring’을 적용한 예시를 보여준다.
- P_a와 P_b가 병합된 뒤(q_start <–> q_goal 사이에 장애물이 없다고 가정) rewiring을 수행하면, 최종적으로 q_start와 q_goal이 가능한 한 직선 경로에 가깝게 연결된 P_merged가 생성된다.
4.5. Process of the Proposed Triangular Inequality-Based RRT-Connect Algorithm

5. 실험 결과
- 제안된 삼각부등식 기반 RRT-Connect 알고리즘의 성능을 검증하기 위해, 시뮬레이터에서 RRT 알고리즘, RRT-Connect 알고리즘, 그리고 제안한 알고리즘을 여러 환경 지도에서 비교하였다.
- 구현 기준
각 알고리즘은 3장과 4장에 제시된 의사코드(A1–A9)를 바탕으로 구현했으며, RRT 알고리즘의 경우 부록 A에 수록된 의사코드(AA1)를 참고하였다.
- 비교용 성능 지표
- 샘플 수 (Number of samples)
- 경로 길이 (Path length, 픽셀 단위)
- 계획 시간 (Planning time, 밀리초 단위)
- 실험 조건
- 동일한 시작점과 목표점으로 50회 반복 실험(첫 경로 발견 시까지)
- 스텝 길이(δ) = 30 픽셀
- 지표 해석
- 샘플 수가 적을수록 동적 환경에서 재계산 비용이 줄어든다.
- 경로 길이는 경로 계획 알고리즘의 최적성을 나타낸다.
- 계획 시간은 첫 경로를 찾는 데 걸린 시간이다.

5.1 실험환경
이 절에서는 시뮬레이션에 사용된 환경 지도와 시뮬레이터, 그리고 이를 실행한 컴퓨터 사양을 소개한다.
- 환경 지도
그림 10에는 본 실험에 사용된 총 8가지 환경 지도가 나타나 있다.- 녹색 원(S)은 시작점(start)을, 보라색 원(G)은 목표점(goal)을 표시한다.
- 노란색(결과 분석 시 파란색)테두리 안의 검은 다각형은 장애물을 의미한다.
- 모든 지도는 가로 600 픽셀, 세로 600 픽셀 크기이다.
본 논문에서는 2017년 한지희[27]가 제안한 벤치마크 환경을 따라 그림 10의 8개 지도를 사용하며, 각 지도는 다음과 같은 특징을 지닌다:- Map 1 (그림 10a)
– 경로 완전성(completeness) 검증이 용이한 환경. - Map 2 (그림 10b)
– 경로 완전성이 확인하기 쉽고, 인공 퍼텐셜 필드 알고리즘의 국소 최소(local minima) 문제 해법 예시로 자주 쓰이는 환경. - Map 3 (그림 10c)
– 최적성(optimality)과 완전성 검증이 쉬우나, 랜덤 샘플링 기반 알고리즘(RRT 등)의 성능이 저하되기 쉬운 구조. - Map 4 (그림 10d)
– 최적성과 계획 시간(planning time) 검증에 유리하며, 장애물 각도가 복잡해질수록 계산량이 늘어나는 셀 분할(cell decomposition) 방식에는 불리한 환경. - Map 5 (그림 10e)
– Map 4와 마찬가지로 최적성·계획 시간 검증이 용이하며, 셀 분할 알고리즘에 불리한 환경. - Map 6 (그림 10f)
– 최적성, 완전성, 계획 시간을 종합적으로 평가하기에 적합한 환경. - Map 7 (그림 10g)
– 완전성과 최적성 검증이 용이하며, Map 2와 마찬가지로 인공 퍼텐셜 필드 알고리즘 실험에 사용되는 환경. - Map 8 (그림 10h)
– 완전성과 계획 시간 검증이 쉽지만 RRT 같은 랜덤 샘플링 기반 알고리즘에 불리한 좁은 통로 구조를 가진 환경.
- 시뮬레이션 실행 사양
표 1에는 본 논문 실험에 사용된 컴퓨터 사양을 정리했다.- 시뮬레이터는 C#(.NET Framework 4.8.03752, Visual Studio Community 2019 v16.1.6)으로 개발했으며, 시각화 부분을 제외한 모든 연산은 단일 스레드로 처리했다.
- 따라서 측정된 계획 시간은 컴퓨터 성능에 따라 차이가 날 수 있다.
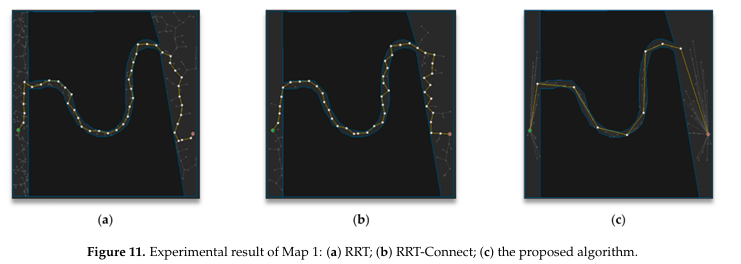
map1에 대한 결과

map2에 대한 결과


map3에 대한 결과


map8에 대한 결과


6.결론
- 본 논문에서는 RRT-Connect 알고리즘의 최적성 한계를 극복하기 위해 삼각부등식 원리를 적용한 삼각부등식 기반 RRT-Connect 알고리즘을 제안하였다.
- 제안된 ‘Triangular-Rewiring’ 기법의 타당성을 수학적으로 검증하고 이를 RRT-Connect에 적용하여 최적 경로에 더 가깝게 수렴하도록 하였다.
- 또한, 제안 알고리즘의 첫 경로 탐색을 위한 샘플 수, 경로 길이, 계획 시간 등의 성능 지표를 확인하기 위해 8가지 환경에서 RRT 및 RRT-Connect 알고리즘과 비교 실험을 수행하였다.
- ==>그 결과, 경로 길이 면에서 제안 알고리즘은 RRT 대비 평균 20%, RRT-Connect 대비 평균 16% 효율이 개선되었으며, 계획 시간 면에서는 RRT 대비 평균 47% 더 빠르고 RRT-Connect 대비 평균 2% 느린 성능을 보였다.
결론적으로 제안 알고리즘은 유사한 샘플 수와 계획 시간을 유지하면서도 RRT-Connect보다 더 짧은 경로를 생성함을 확인하였다. - 다만 한계점으로는 Kinodynamic 계획 문제가 있다. ‘Triangular-Rewiring’ 과정에서 중간 노드가 삭제되면 예리한 모서리를 갖는 비미분(piecewise linear) 경로가 발생하여 로봇의 운동학적 제약을 위반할 수 있다.
- ==>그 결과, 경로 길이 면에서 제안 알고리즘은 RRT 대비 평균 20%, RRT-Connect 대비 평균 16% 효율이 개선되었으며, 계획 시간 면에서는 RRT 대비 평균 47% 더 빠르고 RRT-Connect 대비 평균 2% 느린 성능을 보였다.